RK808 开发指南
发布版本:1.0
日期:2019.11
文档密级:公开资料
前言
概述
本文档主要介绍 RK808 的各个子模块,介绍相关概念、功能、dts 配置和一些常见问题的分析定位。
产品版本
| 芯片名称 | 内核版本 |
|---|---|
| RK808 | 3.10、 4.4、4.19 |
读者对象
本文档(本指南)主要适用于以下工程师:
技术支持工程师
软件开发工程师
修订记录
| 日期 | 版本 | 作者 | 修改说明 |
|---|---|---|---|
| 2019.11.25 | V1.0 | 张晴 | 初始版本 |
[TOC]
基础
概述
RK808 是一款高性能 PMIC,RK808 集成 4 个大电流 DCDC、8 个 LDO、2个开关SWITCH、1 个 RTC、可调上电时序等功能。
系统中各路电源总体分为两种:DCDC 和 LDO。两种电源的总体特性如下(详细资料请自行搜索):
- DCDC:输入输出压差大时,效率高,但是存在纹波比较大的问题,成本高,所以大压差,大电流负载时使用。一般有两种工作模式。PWM 模式:纹波瞬态响应好,效率低;PFM 模式:效率高,但是负载能力差。
- LDO:输入输出压差大时,效率低,成本低,为了提高 LDO 的转换效率,系统上会进行相关优化如:LDO 输出电压为 1.1V,为了提高效率,其输入电压可以从 VCCIO_3.3V 的 DCDC 给出。所以电路上如果允许尽量将 LDO 接到 DCDC 输出回路,但是要注意上电时序。
功能
从使用者的角度看,RK808 的功能概况起来可以分为 4 个部分:
- regulator 功能:控制各路 DCDC、LDO 电源状态;
- rtc 功能:提供时钟计时、定时等功能;
- clk 功能:有两个32.768KHZ时钟输出,一个不可以控常开,一个是软件可控。
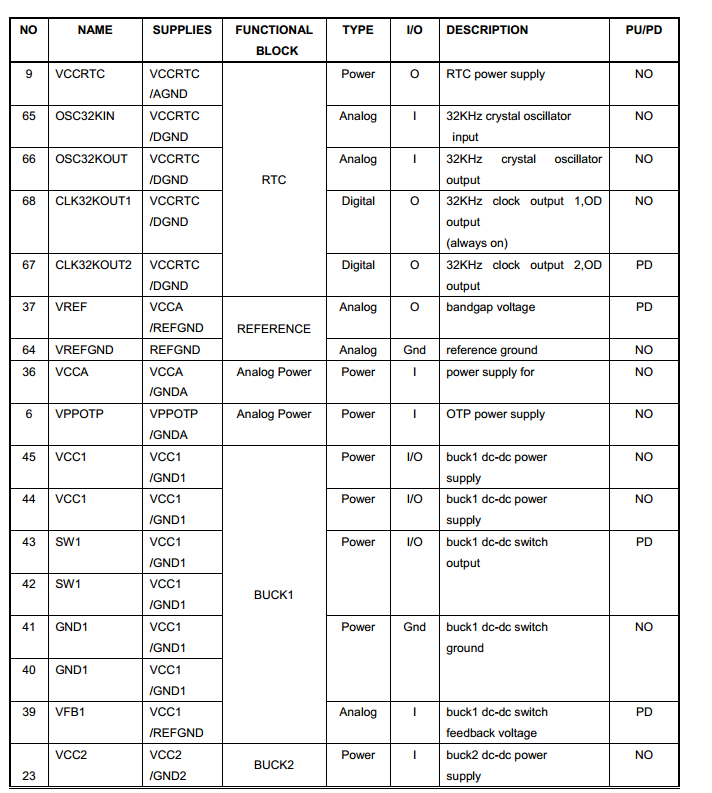
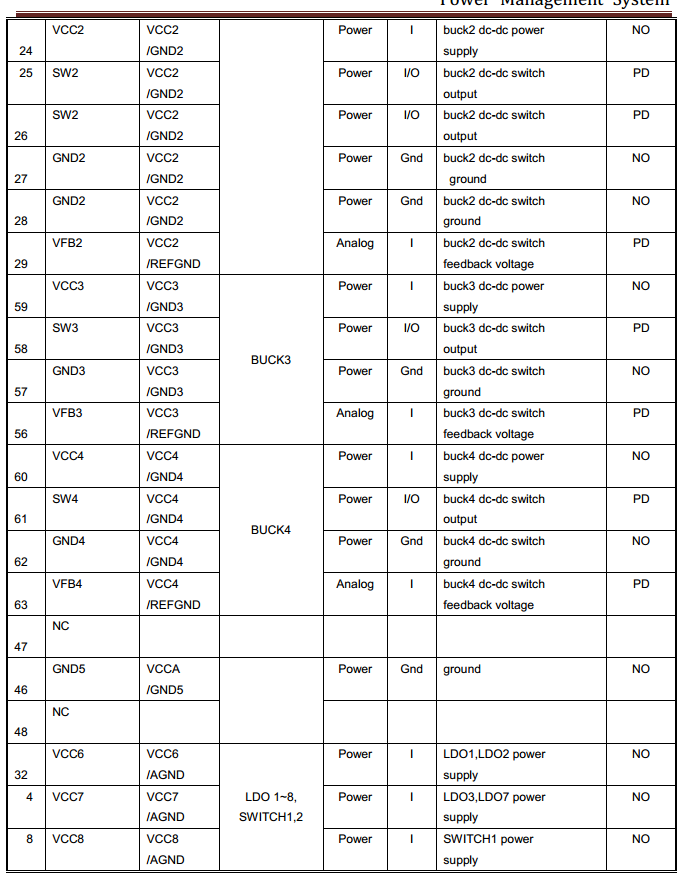
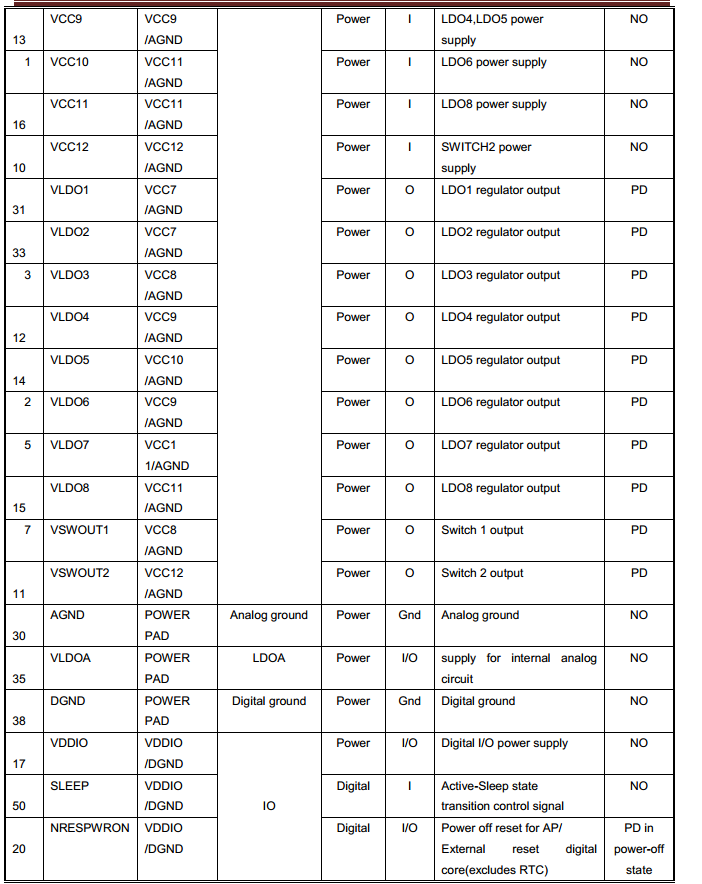
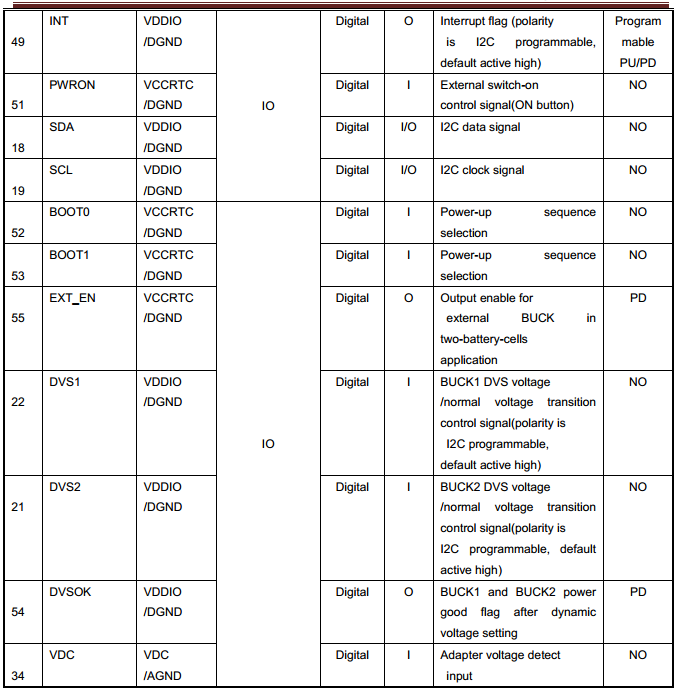
芯片引脚功能
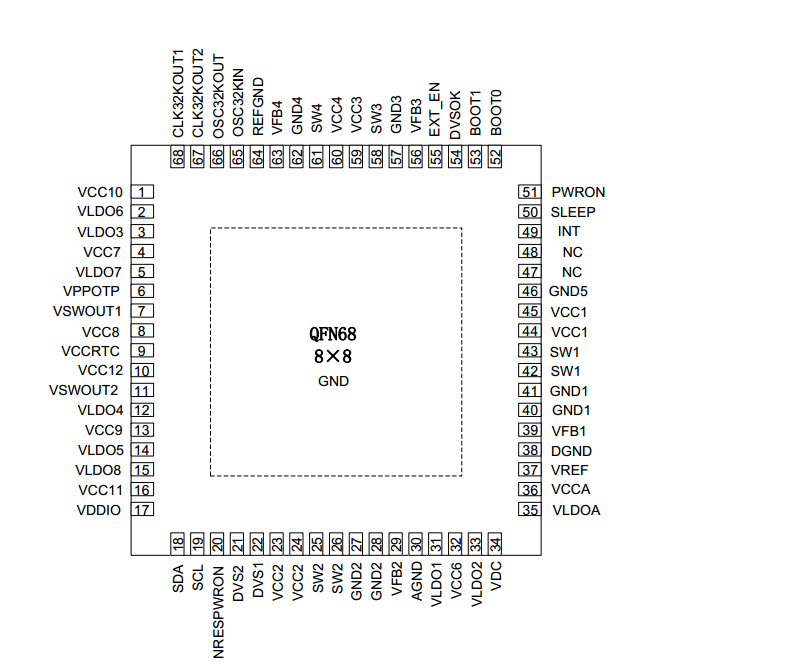
下面描述中,SLEEP 和 INT 引脚需要重点关注:
重要概念
-
I2C 地址
7 位从机地址:0x1b
-
PMIC 有 3 种工作模式
- PMIC normal 模式
系统正常运行时 PMIC 处于 normal 模式,此时 pmic_sleep 为低电平。
- PMIC sleep 模式
系统休眠时需要待机功耗尽量低,PMIC 会切到 sleep 模式减低自身功耗,这时候一般会降低某些路的输出电压,或者直接关闭输出,这可以根据实际产品需求进行配置。系统待机时拉高 pmic_sleep 即可让 PMIC 进入 sleep 状态;当 SoC 唤醒时 pmic_sleep 恢复为低电平,PMIC 退出休眠模式。
- PMIC shutdown 模式
当系统进入关机流程的时候,PMIC 需要完成整个系统的电源下电操作。AP 通过 I2C 指令把 pmic_sleep 配置成 shutdown 模式,然后拉高 pmic_sleep 即可让 PMIC 进入 shutdown 状态。
-
pmic_sleep 引脚
常态为低电平,PMIC 处于 normal 模式。当引脚拉高的时候会切换到 sleep 或者 shutdown 的模式。
-
pmic_int 引脚
常态为高电平,当有中断产生的时候变为低电平。如果中断没有被处理,则会一直维持低电平。
-
pmic_pwron 引脚
pwrkey 的功能需要硬件上将 power 按键接到这个引脚,驱动通过这个引脚来判断按下/释放。
-
各路 DCDC 的工作模式
DCDC 有 PWM(也叫 force PWM)、PFM 模式,但是 PMIC 有一种模式会动态切换 PWM、PFM,这就是我们通常所说的 AUTO 模式。PMIC 支持 PWM、AUTO PWM/PFM 两种模式,AUTO 模式效率高但是纹波瞬态响应会差。出于系统稳定性考虑,运行时都是设置为 PWM 模式,系统进入休眠时会选择切换到 AUTO PWM/PFM。
-
DCDC3 电压调节
DCDC3 这路电源比较特殊,不能通过寄存器修改电压,只能通过外部电路的分压电阻进行调节,所以如果需要修改电压请修改外围硬件,在 Rockchip 的方案上一般作为 VCC_DDR 使用。
-
DCDC 和 LDO 的运行时电压调节范围
-
DCDC 电压范围连续:
电压范围(V) 步进值(mV) 具体档位值(V) 0.7125 ~ 1.45 12.5 0.7125、0.725、0.737.5、 ……、1.45 1.8 ~ 3.3 100 1.8、1.9、2.0、2.2....、3.3 -
LDO 电压连续:
电压范围(V) 步进值(mV) 具体档位值(V) 0.8 ~ 3.4 100 0.8、0.9、1.0、1.1、1.2、 …… 3.4
-
上电条件和时序
-
上电条件
只要满足下面任意一个条件即可以实现 PMIC 上电:
- EN 信号从低电平变高电平触发
- EN 信号保持高电平,且 RTC 闹钟中断触发
- EN 信号保持高电平,按 PWRON 键触发
-
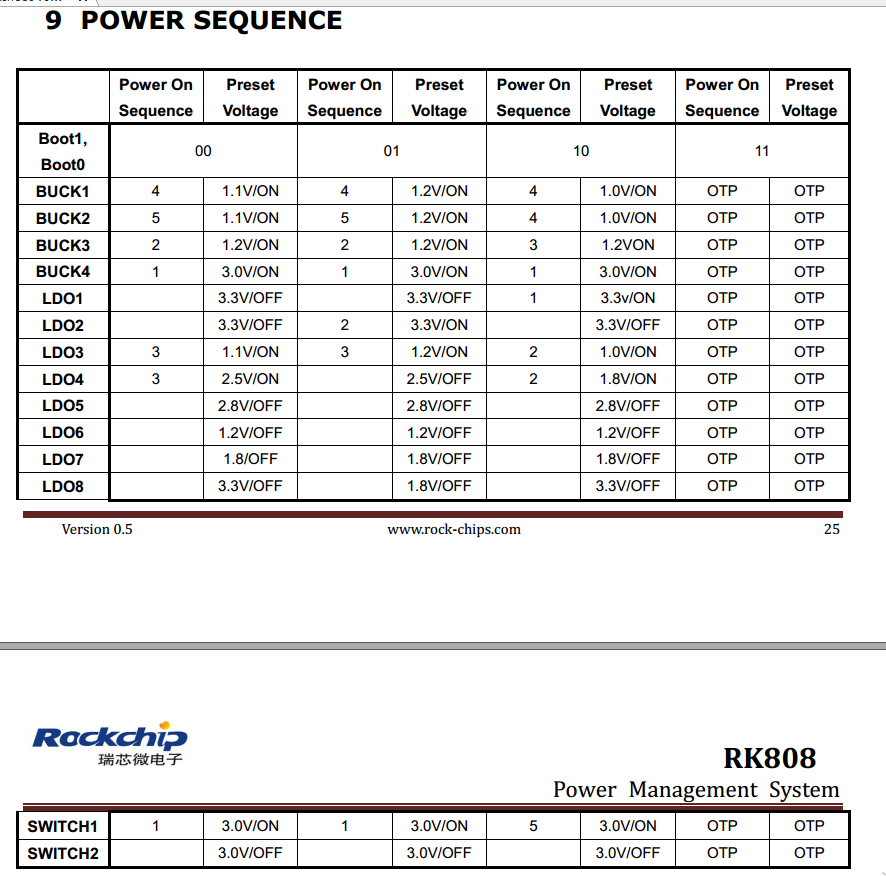
上电时序
每款 SOC 平台对各路电源上电时序要求可能不一样,目前上电时序有如下情况,具体请参考最新的 datasheet:
配置
驱动和 menuconfig
3.10 内核配置
RK808 驱动文件:
drivers/mfd/rk808.c
drivers/mfd/rk808-irq.c
drivers/rtc/rtc-rk808.c
RK808 dts文件可参考:
arch/arm/boot/dts/rk808.dtsi
arch/arm/boot/dts/rk3288-evb-android-rk808-edp.dts
menuconfig 里对应的宏配置:
CONFIG_MFD_RK808
CONFIG_RTC_RK808
4.4 内核配置
RK808 驱动文件:
drivers/mfd/rk808.c
drivers/rtc/rtc-rk808.c
drivers/regulator/rk808-regulator.c
drivers/clk/clk-rk808.c
RK808 dts文件可参考:
arch/arm64/boot/dts/rockchip/rk3399-evb-rev3.dtsi
menuconfig 里对应的宏配置:
CONFIG_MFD_RK808
CONFIG_RTC_RK808
CONFIG_REGULATOR_RK808
CONFIG_COMMON_CLK_RK808
4.19 内核配置
RK808 驱动文件:
drivers/mfd/rk808.c
drivers/rtc/rtc-rk808.c
drivers/regulator/rk808-regulator.c // 跟4.4内核不同
drivers/clk/clk-rk808.c
menuconfig 里对应的宏配置:
CONFIG_MFD_RK808
CONFIG_RTC_RK808
CONFIG_REGULATOR_RK808
CONFIG_COMMON_CLK_RK808
DTS 配置
3.10 内核 DTS 配置
DTS 的配置包括:I2C 挂载、主体、regulator、rtc、poweroff 等部分。
&i2c1 {
rk808: rk808@1b {
reg = <0x1b>;
status = "okay";
};
};
/include/ "rk808.dtsi"
&rk808 {
gpios = <&gpio0 GPIO_A4 GPIO_ACTIVE_HIGH>,
<&gpio0 GPIO_B3 GPIO_ACTIVE_LOW>;
rk808,system-power-controller;
rtc {
status = "disabled";
};
regulators {
rk808_dcdc1_reg: regulator@0 {
regulator-always-on;
regulator-boot-on;
regulator-min-microvolt = <750000>;
regulator-max-microvolt = <1400000>;
regulator-init-microvolt = <1300000>;
regulator-name = "vdd_arm";
regulator-state-mem {
regulator-off-in-suspend;
};
};
rk808_dcdc2_reg: regulator@1 {
.............
};
rk808_dcdc3_reg: regulator@2 {
.............
};
.................................
};
};
-
I2C 挂载
整个完整的 rk808 节点挂在对应的 i2c 节点下面,并且配置 status = "okay";
-
主体部分
- 不可修改部分
rk808,system-power-controller:声明RK808具备管理系统下电的功能;
-
可修改部分
gpios:指定 pmic_int(第一个)和 pmic_sleep(第二个)引脚;
- regulator 部分
-
regulator-name: 电源名字,建议和硬件图上保持一致,使用 regulator_get 接口时需要匹配这个名字; -
regulator-min-microvolt:运行时可调节的最小电压; -
regulator-max-microvolt:运行时可调节的最大电压; -
regulator-initial-mode:运行时 DCDC 工作模式,一般配置为 1。 1:force pwm,2:auto pwm/pfm; -
regulator-state-mode: 休眠时 DCDC 工作模式,一般配置为 2。1:force pwm, 2:auto pwm/pfm; -
regulator-initial-state:suspend 时的模式,必须配置成 3; -
regulator-boot-on:存在这个属性时,在注册 regulator 的时候就会使能这路电源; -
regulator-always-on:存在这个属性时,运行时不允许关闭这路电源且会在注册的时候使能这路电源; -
regulator-state-enabled:休眠时保持上电状态,想要关闭该路电源,则改成”regulator-state-disabled”; -
regulator-state-uv:休眠不断电情况下的待机电压。
说明:
如果 regulator-min-microvolt 和 regulator-max-microvolt 的电压相等,则在注册这个 regulator 的时候系统框架默认会把这个电压设置下去并使能这路电源,不需要使用者干预。
如果 regulator-boot-on 或者 regulator-always-on 存在,则系统框架在注册这路 regulator 的时候默认会进行 enable,此时的这路 regulator 的电压有 2 种情况:如果 regulator-min-microvolt 和 regulator-max-microvolt 的电压相等,则系统框架会把这路电压设置为当前这个电压值;如果 regulator-min-microvolt 和 regulator-max-microvolt 的电压不相等,则此时的电压是 PMIC 的本身的硬件默认上电电压。
- rtc 部分
如果不想使能 RTC 的功能(如 box 产品上),则需要像上面那样增加节点,显式指明为 status = "disabled"。如果需要使能的的话则可以把整个 RTC 节点去掉或者设置状态为 status = "okay"即可。
- poweroff 部分
因为 RK808 驱动自动拦截关机命令,执行写I2C关闭PMIC输出。
rk808_shutdown是注册syscore shutdown,用于一些准备工作,如打印关机电压,关闭RTC中断等。
static void rk808_shutdown(void)
{
int ret,i,val;
u16 reg = 0;
struct rk808 *rk808 = g_rk808;
printk("%s\n",__func__);
/***************get dc1\dc2 voltage *********************/
for(i=0;i<2;i++){
reg = rk808_reg_read(rk808,rk808_BUCK_SET_VOL_REG(i));
reg &= BUCK_VOL_MASK;
val = 712500 + reg * 12500;
printk("%s,line=%d dc[%d]= %d\n", __func__,__LINE__,(i+1),val);
}
/*****************************************************/
ret = rk808_set_bits(rk808, RK808_INT_STS_MSK_REG1,(0x3<<5),(0x3<<5)); //close rtc int when power off
ret = rk808_clear_bits(rk808, RK808_RTC_INT_REG,(0x3<<2)); //close rtc int when power off
mutex_lock(&rk808->io_lock);
mdelay(100);
}
static struct syscore_ops rk808_syscore_ops = {
.shutdown = rk808_shutdown,
};
rk808_device_shutdown是真正写I2C关闭PMIC输出。
static void rk808_device_shutdown(void)
{
int ret,i;
u8 reg = 0;
struct rk808 *rk808 = g_rk808;
for(i=0;i < 10;i++){
printk("%s\n",__func__);
ret = rk808_i2c_read(rk808,RK808_DEVCTRL_REG,1,®);
if(ret < 0)
continue;
ret = rk808_i2c_write(rk808, RK808_DEVCTRL_REG, 1,(reg |(0x1 <<3)));
if (ret < 0) {
printk("rk808 power off error!\n");
continue;
}
}
while(1)wfi();
}
EXPORT_SYMBOL_GPL(rk808_device_shutdown);
4.4 内核 DTS 配置
DTS 的配置包括:i2c 挂载、主体、rtc、clk、regulator 等部分。
&i2c1 {
status = "okay";
rk808: pmic@1b {
compatible = "rockchip,rk808";
reg = <0x1b>;
interrupt-parent = <&gpio1>;
interrupts = <21 IRQ_TYPE_LEVEL_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&pmic_int_l &pmic_dvs2>;
rockchip,system-power-controller;
wakeup-source;
#clock-cells = <1>;
clock-output-names = "rk808-clkout1", "rk808-clkout2";
vcc1-supply = <&vcc3v3_sys>;
vcc2-supply = <&vcc3v3_sys>;
vcc3-supply = <&vcc3v3_sys>;
vcc4-supply = <&vcc3v3_sys>;
vcc6-supply = <&vcc3v3_sys>;
vcc7-supply = <&vcc3v3_sys>;
vcc8-supply = <&vcc3v3_sys>;
vcc9-supply = <&vcc3v3_sys>;
vcc10-supply = <&vcc3v3_sys>;
vcc11-supply = <&vcc3v3_sys>;
vcc12-supply = <&vcc3v3_sys>;
vddio-supply = <&vcc1v8_pmu>;
regulators {
vdd_log: DCDC_REG1 {
regulator-always-on;
regulator-boot-on;
regulator-min-microvolt = <750000>;
regulator-max-microvolt = <1350000>;
regulator-ramp-delay = <6001>;
regulator-name = "vdd_log";
regulator-state-mem {
regulator-on-in-suspend;
regulator-suspend-microvolt = <900000>;
};
};
vdd_cpu_l: DCDC_REG2 {
regulator-always-on;
regulator-boot-on;
regulator-min-microvolt = <750000>;
regulator-max-microvolt = <1350000>;
regulator-ramp-delay = <6001>;
regulator-name = "vdd_cpu_l";
regulator-state-mem {
regulator-off-in-suspend;
};
};
vcc_ddr: DCDC_REG3 {
.................
};
.............................
};
};
};
- i2c 挂载
整个完整的 rk808 节点挂在对应的 i2c 节点下面,并且配置 status = "okay";
- 主体部分
- 不可修改:
compatible = "rockchip,rk808";
reg = <0x1b>;
rockchip,system-power-controller;
wakeup-source;
#clock-cells = <1>;
- 可修改(按照 pinctrl 规则)
interrupt-parent:pmic_int 隶属于哪个 gpio; interrupts:pmic_int 在 interrupt-parent 的 gpio 上的引脚索引编号和极性; pinctrl-names:不修改,固定为 "default"; pinctrl-0:引用 pinctrl 里定义好的 pmic_int 引脚;
- rtc
如果 menuconfig 选中了这个模块,但是实际又不需要使能这几个驱动,那么可以在 dts 里增加 rtc节点,并且显式指明状态为 status = "disabled",这样就不会使能驱动,但是开机信息会有错误 log 报出,可以忽略;如果要使能驱动,则可以去掉相应的节点,或者设置状态为 status = "okay"。
- regulator
regulator-compatible:驱动注册时需要匹配的名字,不能改动,否则会加载失败;regulator-name:电源的名字,建议和硬件图上保持一致,使用 regulator_get 接口时需要匹配这个名字;regulator-init-microvolt:u-boot阶段的初始化电压,kernel阶段无效;regulator-min-microvolt:运行时可以调节的最小电压;regulator-max-microvolt:运行时可以调节的最大电压;regulator-initial-mode:运行时 DCDC 的工作模式,一般配置为 1。 1:force pwm,2:auto pwm/pfm;regulator-mode:休眠时 DCDC 的工作模式,一般配置为 2。1:force pwm, 2:auto pwm/pfm;regulator-initial-state:suspend 时的模式,必须配置成 3;regulator-boot-on:存在这个属性时,在注册 regulator 的时候就会使能这路电源;regulator-always-on:存在这个属性时,表示运行时不允许关闭这路电源且会在注册的时候使能这路电源;regulator-ramp-delay:DCDC 的电压上升时间,固定配置为 12500;regulator-on-in-suspend:休眠时保持上电状态,想要关闭该路电源,则改成”regulator-off-in-suspend”;regulator-suspend-microvolt:休眠不断电情况下的待机电压。
- poweroff 部分
4.4上使用pm_power_off_prepare,实现PMIC关机前的准备工作,如关闭RTC中断,配置一些特殊寄存器等。 注册syscore shutdown, 真正用于PMIC关机。
- clk 部分
如果某个节个需要引用 RK808 的 clk 进行使用,引用格式如下:
clocks = <&rk808 1>;
第一个参数: &rk808 固定,不可改动;
第二个参数: 引用 rk808 的哪个 clk,只能是 0 或者 1,其中 0:rk808-clkout1, 1:rk808-clkout2;
4.19 内核 DTS 配置
请参考4.4内核DTS配置。差异点:4.19内核的DTS配置不再需要gpio子节点,但其他模块依然使用gpios = <&rk808 0 GPIO_ACTIVE_LOW>;的方式引用和使用rk808的pin脚。
函数接口
如下几个接口基本可以满足日常使用,包括 regulator 开、关、电压设置、电压获取等:
-
获取 regulator:
struct regulator *regulator_get(struct device *dev, const char *id)dev 默认填写 NULL 即可,id 对应 dts 里的 regulator-name 属性。
-
释放 regulator
void regulator_put(struct regulator *regulator) -
打开 regulator
int regulator_enable(struct regulator *regulator) -
关闭 regulator
int regulator_disable(struct regulator *regulator) -
获取 regulator 电压
int regulator_get_voltage(struct regulator *regulator)
- 设置 regulator 电压
int regulator_set_voltage(struct regulator *regulator, int min_uV, int max_uV)
传入的参数时保证 min_uV = max_uV,由调用者保证。
- 范例
struct regulator *rdev_logic;
rdev_logic = regulator_get(NULL, "vdd_logic"); // 获取vdd_logic
regulator_enable(rdev_logic); // 使能vdd_logic
regulator_set_voltage(rdev_logic, 1100000, 1100000); // 设置电压1.1v
regulator_disable(rdev_logic); // 关闭vdd_logic
regulator_put(rdev_logic); // 释放vdd_logic
说明:4.4或者4.19内核还提供了devm_开头的regulator接口帮开发者管理要申请的资源。
Debug
内核
因为 PMIC 涉及的驱动在使用逻辑上都不复杂,重点都体现在最后的寄存器设置上。所以目前常用的 debug 方式就是直接查看 rk808 的寄存器,通过如下节点:
/sys/rk808/rk808_test
读寄存器:
echo r [addr] > /sys/rk808/rk808_test
写寄存器:
echo w [addr] [value] > /sys/rk808/rk808_test
一般写操作执行完之后最好再读一遍确认是否写成功。
内核
命令格式同 3.10 内核一样,只是节点路径不同,4.4 内核上的 debug 节点路径是:
/sys/rk8xx/rk8xx_dbg
内核
请参考4.4内核命令。